FiloBot: робот, который медленно «растет», как живое растение
Принцип работы FiloBot одновременно прост и гениален. В его головке есть миниатюрный экструдер, который плавит пластиковую нить и выдавливает её, формируя новый участок «стебля». Пластик почти мгновенно затвердевает, оставляя после себя прочный след. Питание и материал поступают по тонкому шлангу от основания — как сосуды у настоящего растения. Скорость роста — всего несколько миллиметров в минуту. Но согласитесь, настоящая лоза и то не торопится.
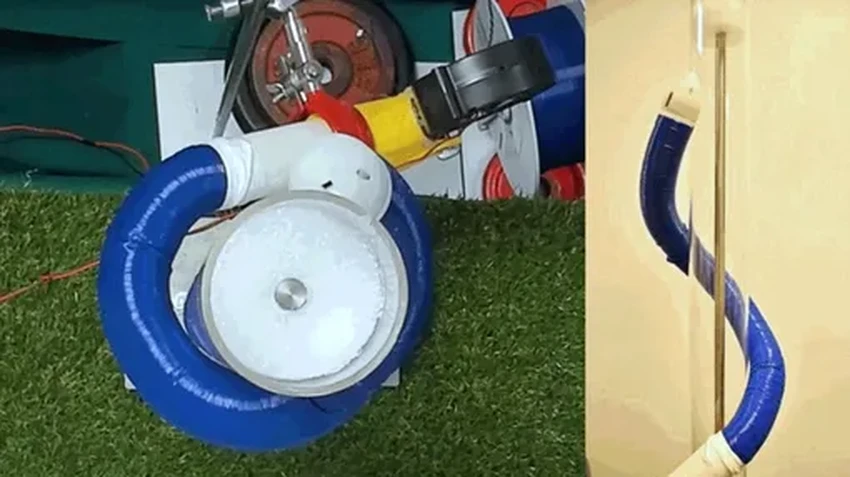
Робот соединён с базой тонким шлангом, по которому из катушки подаётся свежий пластик. Его скорость роста невелика — всего несколько миллиметров в минуту. Но разве настоящая лоза растёт быстрее? Порой природа не спешит, и в этой неторопливости есть своя мудрость.
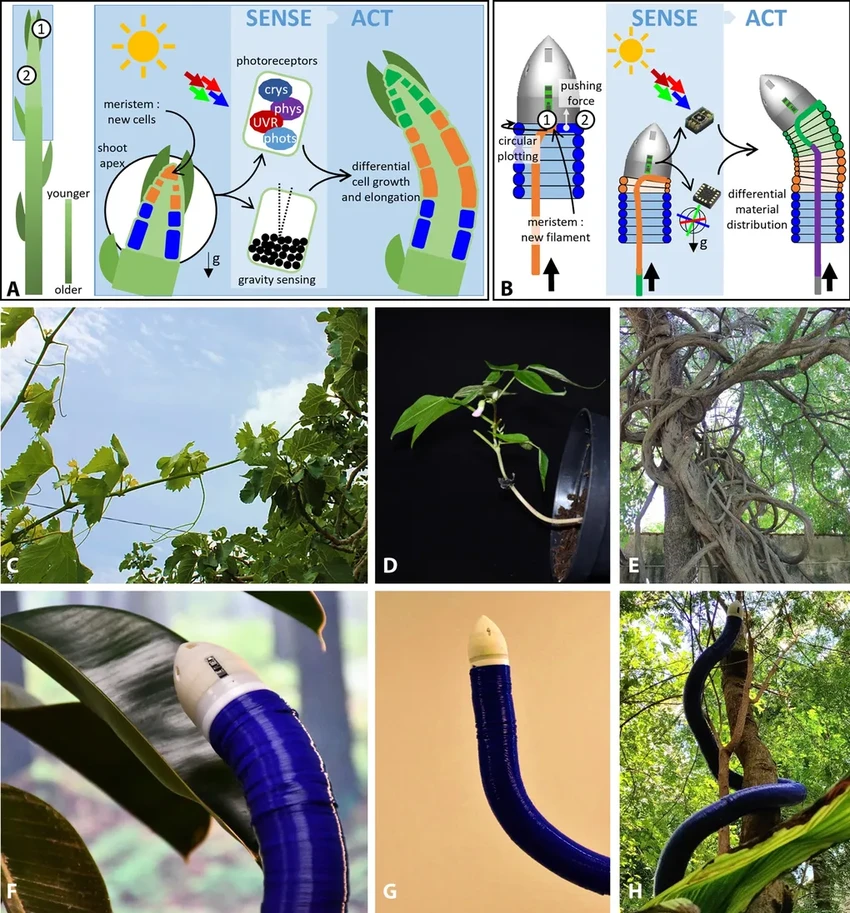
Сравнение роста робота и роста растения (А) Зона роста растения. Вершина побега состоит из слоев клеток, составляющих меристематическую часть (точка 1) и область растяжения клеток (точка 2). Фоторецепторы и гравитационно-чувствительные клетки расположены внутри верхушки побега. Обработка внешнего стимула определяет рост клеток, удлинение и ориентацию побега. (B) Схематическое изображение растущих регионов робота. По аналогии с верхушкой побега робот содержит чувствительные элементы и область нанесения материала, локализованную в его головке (точки 1 и 2). В меристемоподобной области происходит добавление материала и генерация сил, необходимых для продвижения кончика вперед. Контроль построения графика определяет нижний или верхний слой материала вдоль оси стебля, аналогично дифференциальному делению и удлинению клеток. (C–E) Примеры формы и поведения вьющихся растений. (от F до H) FiloBot имитирует то же поведение, что на (C) и (F). На (С) стебель виноградной лозы перебрасывается на ветви фигового дерева. Точно так же робот может распознавать наличие тени от растения и расти в ее направлении (F). (D) и (G) представляют собой гравитропизм, то есть направленный рост против силы тяжести, на выращенном в лаборатории растении фасоли (D) и с помощью робота (G). (E) Сложное поведение роста растений на опорах. (H) Выращенный в лаборатории стебель FiloBot в сочетании с реальными растениями в лесной среде обитания указывает на сходство размера, формы и масштаба естественных растений и робота.
«Медленный рост — это не недостаток, а стратегическое преимущество», — объясняет Эмануэла Дель Дотторе, ведущий исследователь проекта. Представьте себе обрушившееся здание: любое резкое движение может вызвать новый обвал. А вот тонкий, прочный стебель, который постепенно проникает сквозь щели, может стать идеальным проводником для камеры или датчиков, не нарушая хрупкого равновесия. Более того, такая технология в перспективе может лечь в основу самовозводящихся конструкций — инфраструктуры, которая строит сама себя.
«Мы восхищаемся удивительными способностями растений покорять самые сложные и изменчивые среды», — признаётся Дель Дотторе. И это восхищение передаётся в каждой детали FiloBot. Ведь иногда, чтобы создать что-то по-настоящему продвинутое, нужно не изобретать колесо, а просто внимательнее посмотреть на ветку, тянущуюся к свету.
В топе